POP adalah singkatan dari Partially Order Plan, untuk lebih jelasnya adalah proses sebuah pendekatan untuk melakukan perencanaan otomatis yang membantu dalam membuat keputusan tentang pemesanan tindakan seterbuka mungkin. Ini berkaitan dengan Totally Order Plan, yang mana menghasilkan urutan yang tepat dari sebuah tindakan.
Berikut adalah gambar langkah langkah dalam POP :

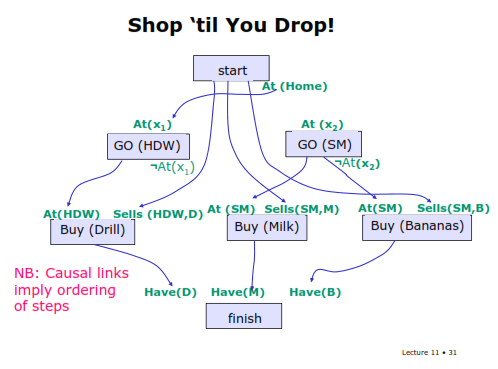
Dalam penggunaan POP kali ini akan menggunakan contoh sebagai berikut. Disitu tertulis initial state, goal state, dan aksi yang dapat dilakukan.



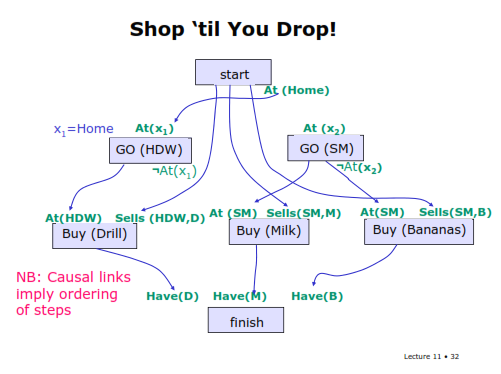
Selanjutnya kita penuhi prekondisi aksi dari Go(HDW) kita inisialkan x1=home.

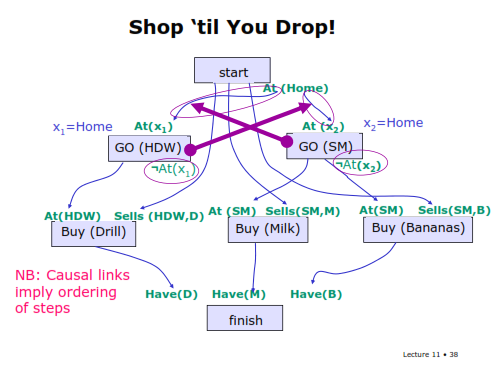
Akan tetapi ketika kita melihat lagi efek daripada aksi Go(HDW) dan Go(SM)ternyata mereka saling meniadakan dan hal ini tidak boleh terjadi.



Sekian dan terimakasih, semoga dapat bermanfaat bagi kita semua...
Sumber referensi :
- https://en.wikipedia.org/wiki/Partial-order_planning
- Semua gambar diambil dari PDF "Lecture 11 FinalPart1 (Partially Order Plan)"
- https://ihzhadamy.blogspot.co.id/2016/10/partially-order-plan.html
Tidak ada komentar:
Posting Komentar